간략한 요약
이 비디오에서는 토션(비틀림)에 대해 배우고, 토션이 무엇인지, 우리 주변에서 토션이 발생하는 상황을 파악하고 분석하는 방법, 그리고 토션으로 인한 파괴를 어떻게 이해할 수 있는지 설명합니다.
- 토션의 기본 개념과 다양한 예시(문 손잡이, 스크루 드라이버 등)
- 순수 토션과 횡-비틀림 좌굴의 차이점
- 토션으로 인한 변형률 및 응력 계산 방법
- 비틀림 공식과 관련된 문제 풀이 방법
소개 [0:02]
토션(비틀림)에 대한 소개와 학습 목표를 설명합니다. 과거에는 인장이나 압축을 받는 부재에 대해 배웠지만, 오늘은 비틀 때 발생하는 파괴 현상과 비틀림을 유발하는 상황들을 파악하고 분석하는 방법에 대해 배울 것입니다.
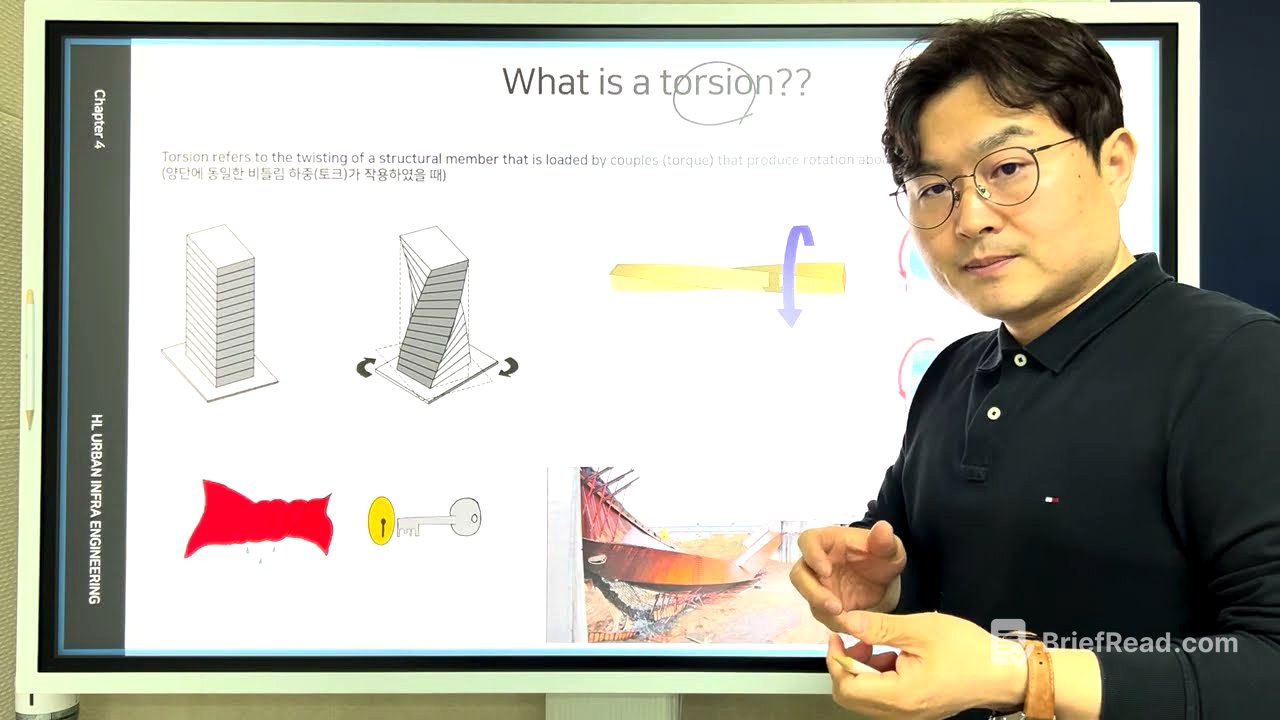
토션이란 무엇인가? [0:51]
토션(비틀림)의 개념과 일상생활에서의 다양한 예시를 소개합니다. 문을 열 때 문손잡이, 스크루 드라이버 등 비틀림이 작용하는 상황을 설명하고, 구조 부재에 토크가 작용할 때 발생하는 반응을 설명합니다. 나사를 조일 때 과도한 토크로 인해 나사 머리가 잘려나가는 현상을 예시로 들어 하중과 내력의 관계를 설명합니다. 빨래를 짤 때, 열쇠를 돌릴 때 등 다양한 상황에서 토크가 작용하는 것을 보여줍니다. 교량 거더의 횡-비틀림 좌굴 현상을 언급하며, 이 수업에서는 순수 비틀림 조건에 대해 집중적으로 다룰 것임을 밝힙니다.
원형 로드의 변형 [3:52]
원형 로드에 토션이 작용할 때 발생하는 변형에 대해 설명합니다. 모든 부재는 비틀림을 받으면 변형이 발생하며, 스크루 드라이버로 나사를 조일 때 정확한 토크를 가하지 않으면 문제가 발생할 수 있음을 지적합니다. 축 방향에 대해 정확하게 모멘트를 가해야 하며, 스티어링 로드, 드라이브 샤프트, 엑셀, 프로펠러 샤프트 등 다양한 부품에 토션이 작용하고 있음을 설명합니다. 커플 모멘트와 커플 포스의 개념을 소개하고, 자동차 핸들을 예시로 들어 두 개의 동일한 하중이 반대 방향으로 작용하여 토크가 발생하는 것을 설명합니다. 토크의 단위를 뉴턴미터(Nm)로 설명하고, 오른손 법칙을 이용하여 회전 방향과 힘의 방향을 설명합니다.
순수 토션 [8:32]
순수 토션(비틀림) 조건에서 부재가 받는 변형을 설명합니다. 한쪽 끝을 고정하고 토크를 가하면 비틀림이 발생하며, 이때 발생하는 비틀림 각(angle of twist)이 중요합니다. 모든 단면은 평면과 원형을 유지하고, 반지름은 직선을 유지하며, 회전각은 양 끝에서 선형적으로 변한다는 조건을 만족해야 순수 비틀림 조건을 만족합니다. 미소 요소(infinitesimal element)를 확대하여 비틀림을 받을 때 발생하는 전단 변형률(shear strain) 감마(γ)와 비틀림 각도를 설명합니다. 원래의 사각형이 비틀림에 의해 변형되는 과정을 시각적으로 보여주고, 전단 변형률은 탄젠트 값으로 표현될 수 있음을 설명합니다. 단위 길이당 비틀림 각을 세타(θ)로 정의하고, 비틀림 변화율을 설명합니다.
전단 변형률 [13:23]
전단 변형률(shear strain)과 관련된 공식을 설명하고, 각 변수의 의미를 강조합니다. 감마(γ)는 ρθ로 표현될 수 있으며, 여기서 ρ는 임의의 내부 지점까지의 거리, θ는 단위 길이당 비틀림 각입니다. 감마_max는 표면에서 발생하는 최대 전단 변형률을 의미하며, 내부로 들어올수록 전단 변형률은 작아집니다. 중심점에서는 전단 변형률이 0이 됩니다. 임의의 내부 지점에서 발생하는 전단 변형률은 전체 반지름(R)에 대한 해당 지점까지의 거리(ρ)의 비율로 결정됩니다. 원형 봉 내부의 전단 변형률은 중심에서부터 반지름 방향으로 선형적으로 감소합니다. 중공 단면(hollow section)의 경우에도 동일한 원리가 적용되며, R1과 R2 값을 알면 쉽게 계산할 수 있습니다.
전단 응력 [17:06]
전단 응력(shear stress)과 전단 변형률(shear strain)의 관계를 설명하고, 후크의 법칙(Hooke's law)을 적용합니다. 표면에서 발생하는 최대 전단 응력(τ_max)은 전단 탄성 계수(G)와 최대 전단 변형률(γ_max)의 곱으로 표현됩니다. 전단 응력은 네 방향에서 커플(couple) 형태로 작용하며, 종이를 자를 때 미세 요소를 잘라보면 마름모 형태로 늘어나는 것을 볼 수 있습니다. 임의의 지점에서 전단 응력을 구하려면 전체 반지름(R)에 대한 해당 지점까지의 거리(ρ)의 비율을 알아야 합니다. 전단 응력은 R/ρ 비율에 따라 달라지며, 표면에서 발생하는 최대 전단 응력(τ_max)을 알면 내부 지점의 전단 응력을 쉽게 구할 수 있습니다.
비틀림 공식 [21:04]
비틀림 공식(torsion formula)을 유도하고, 각 변수의 의미를 설명합니다. 미소 요소(infinitesimal element)에 작용하는 전단 응력(τ)을 고려하여 요소에 대한 모멘트 값을 구합니다. 모멘트는 힘(전단력) 곱하기 거리로 계산되며, 전단력은 전단 응력 곱하기 면적으로 계산됩니다. 미소 요소에 대한 모멘트를 모두 더하면 단면 전체에 작용하는 토크(T)가 됩니다. 인티그럴(integral) ρ² dA는 극관성 모멘트(polar moment of inertia, IP)를 나타내며, 이는 원점에서 극좌표로 계산한 값입니다. 최종적으로 전단 응력(τ)은 Tρ/IP로 표현되며, 최대 전단 응력(τ_max)은 TR/IP로 표현됩니다. 극관성 모멘트는 Ix + Iy로 계산할 수 있습니다. 비틀림 공식을 암기하는 것이 중요하며, 다양한 단면에 적용할 수 있도록 이해해야 합니다.
비틀림 각 공식 [25:35]
비틀림 각(angle of twist)을 계산하는 공식을 유도하고, 축 방향 변형 공식과의 유사성을 설명합니다. 비틀림 강도식 θ = T / (G * IP)를 활용하여 비틀림 각을 계산합니다. θ는 단위 길이당 비틀림 각을 나타내므로, 전체 비틀림 각 Φ는 θ * L로 계산됩니다. 따라서 Φ = (T * L) / (G * IP)입니다. 이 공식은 축 방향 변형 공식 Δ = (P * L) / (A * E)와 유사하며, G는 E에, IP는 A에, T는 P에 대응됩니다. 비틀림 각 공식과 응력 공식을 명확히 이해하면 다양한 문제를 해결할 수 있습니다. 비틀림 강성은 G * IP / L로, 유연도는 L / (G * IP)로 정의됩니다. IP 값이 크면 강성이 커져 비틀림이 잘 발생하지 않습니다.
문제 풀이 [28:37]
비틀림 공식과 관련된 문제 풀이 방법을 설명하고, 흔히 발생하는 실수들을 지적합니다. 문제에서 주어진 단위를 통일하는 것이 중요하며, mm 단위를 m 단위로 변환하거나, N·m 단위를 N·mm 단위로 변환해야 합니다. 최대 전단 응력(τ_max)을 구하는 공식 τ_max = (T * R) / IP를 활용하고, 원형 단면의 극관성 모멘트 IP = (π * d^4) / 32임을 상기시킵니다. 비틀림 각을 구하는 공식 Φ = (T * L) / (G * IP)를 활용하고, 라디안(radian) 단위를 도로 변환할 수 있습니다. 불균일 비틀림(non-uniform torsion)의 경우, 각 구간별로 토크를 계산하고 비틀림 각을 더해야 합니다. 단면이 변하는 경우, 적분(integral)을 사용하여 비틀림 각을 계산해야 합니다.
불균일 비틀림 [31:41]
불균일 비틀림(non-uniform torsion) 문제를 해결하는 방법을 설명합니다. 여러 개의 기어봉이 연결된 경우, 각 구간별로 작용하는 토크를 분리하여 계산해야 합니다. 각 구간별로 비틀림 각을 계산한 후, 전체 비틀림 각은 각 구간의 비틀림 각을 모두 더하여 구할 수 있습니다. 단면이 변하는 경우, 단면 변화에 따른 극관성 모멘트(IP) 변화를 고려하여 적분(integral)을 사용하여 비틀림 각을 계산해야 합니다.
응력 상태 분석 [38:02]
순수 전단(pure shear) 상태에서의 응력 상태를 분석하고, 전단 응력의 부호 규칙을 설명합니다. 순수 전단은 인장이나 압축이 전혀 작용하지 않고 오직 전단 응력만 발생하는 상태를 의미합니다. 전단 응력은 커플(couple) 형태로 작용하며, 특정 방향으로 작용하는 전단 응력을 플러스(+)로, 반대 방향으로 작용하는 전단 응력을 마이너스(-)로 정의합니다. 경사면에서 전단 응력을 계산하는 방법을 설명하고, 코사인(cosine)과 사인(sine) 법칙을 활용합니다. 힘의 평형(force equilibrium)을 이용하여 수직 응력(normal stress)과 전단 응력의 관계를 유도합니다. 비틀림을 작용했을 때 45도 방향으로 파괴가 발생하는 이유를 설명하고, 45도 방향에서 수직 응력이 가장 크기 때문이라고 설명합니다.
후크의 법칙 [43:27]
후크의 법칙(Hooke's law)을 이용하여 전단 응력과 전단 변형률의 관계를 설명합니다. 탄성 계수(E)와 전단 탄성 계수(G)의 관계를 설명하고, 최대 전단 변형률(γ_max)과 최대 수직 변형률(ε_max)의 관계를 유도합니다. 최대 수직 변형률은 최대 전단 변형률의 절반과 같습니다.
문제 풀이 예시 [44:51]
비틀림 공식과 관련된 문제 풀이 예시를 제공하고, 각 단계별 계산 과정을 상세히 설명합니다. 최대 전단 응력(τ_max)을 구하는 공식 τ_max = (T * R) / IP를 활용하고, 최대 수직 변형률(ε_max)은 최대 전단 변형률(γ_max)의 절반임을 이용하여 문제를 해결합니다.
전단 탄성 계수 [46:05]
전단 탄성 계수(G)를 구하는 방법을 설명하고, 푸아송 비(Poisson's ratio, ν)와의 관계를 설명합니다. 전단 탄성 계수를 직접 구하기 어렵기 때문에, 탄성 계수(E)와 푸아송 비(ν)를 이용하여 G = E / (2 * (1 + ν)) 공식을 활용합니다. 강재의 푸아송 비는 약 0.3, 콘크리트의 푸아송 비는 약 0.2입니다. 전단 탄성 계수는 탄성 계수의 약 1/2에서 1/3 정도입니다. 재료 물성치(material properties)에 대한 정보를 참고하여 문제를 해결할 수 있습니다.
마무리 [47:34]
비틀림에 대한 강의를 마무리하며, 연습 문제를 많이 풀어보는 것이 중요하다고 강조합니다. 전단 응력 계산 공식과 비틀림 각도 계산 공식을 잊지 말고, 궁금한 점이 있으면 언제든지 질문하라고 격려합니다.


![“중국, 희토류 수출 전면 통제! 반도체·2차전지 ‘충격’ 오나?” f. 에이제이인베스트 주식전략 이재규 본부장 [마켓인사이드]](https://wm-img.halpindev.com/p-briefread_c-10_b-10/urlb/aHR0cDovL2ltZy55b3V0dWJlLmNvbS92aS9aN1BUVUlCaEtHRS9ocWRlZmF1bHQuanBn.jpg)

![[70일 아기 2주만에 통잠자는 수면교육 후기] 7시에 육퇴ㅣ등센서 심한 아가 스스로 잠들게 만들기ㅣ울리지 않고❌ 수면교육해요](https://wm-img.halpindev.com/p-briefread_c-10_b-10/urlb/aHR0cDovL2ltZy55b3V0dWJlLmNvbS92aS9KNXJzWk9fcFRXdy9ocWRlZmF1bHQuanBn.jpg)